纵横大鹏CW-25

全新一代CW-25
专为大面积任务范围设计的油动垂直起降固定翼无人机,可配备电喷系统,具有航时长、速度快、载荷大、结构稳定、可靠性高等特点。满足高海拔地带持续飞行。
 |  |  |
| 雨雪天气 | 移动起降 | 移动起降 |
技术数据
| 硬件 | 机身长度 | 2.1m |
| 翼展 | 4.0m | |
| 起飞重量 | 25kg | |
| 无线电链路范围 | 50km / 100km(可选) | |
| DGPS | RTK/PPK | |
| 模块化设计 | 是 | |
| 一机多用 | 是 | |
| 携带箱尺寸 | 2180×420×560mm | |
| 电喷发动机 | 64cc | |
| EFI Engine | 64cc | |
| 配件 | 遥控器 | JOUAV®TC-101遥控器; 专为纵横大鹏®CW系列量身打造,1000米遥控距离,内置电池续航时间大于6小时 |
| 有效负载 | 任务载荷 | 3~6kg |
| 双光吊舱 | MG-200S 双光吊舱 | |
| LiDAR | JoLiDAR60(MEMS) / JoLiDAR62(Optical fiber IMU)LiDAR System | |
| 飞行 | 续航时间 | 360分钟 |
| 巡航速度 | 100km/h | |
| 抗风能力 | 7级 | |
| 实用升限 | 7000m | |
| 起飞海拔 | 4500m | |
| 起降方式 | 垂直起降 | |
| 垂直方向定位精度 | 3cm | |
| 水平方向定位精度 | 1cm+1ppm | |
| 软件 | 地面站软件 | CWCommander |
CW-25无人机航测系统
- 飞行平台
CW-25为双尾撑布局、后推式油电混动垂直起降固定翼无人机。CW-25除具备垂直起降,全自主起飞,RTK定点起降、精准导航等优异功能外,其特点是载荷能力高达6kg,采用了全球先进的电喷发动机技术,续航可达6.4小时,起降海拔4500米,巡航高度7000米,可搭载设备更加多元化。CW-25连接结构全部采用快锁装置,可快速拆解为11部分;展开撤收时间小于10分钟;拆解后可装入1480x630x660mm包装箱,运输携带方便。
性能特点:
高海拔:可在4500m海拔起飞,巡航高度达到7000m
发动机:配备国际先进的电喷发动机,效率高、工作稳定,并且配有电启动装置,可实现自动打火
垂直起降:大大减小对场地、弹射架、降落伞等依赖
多任务设备更换:载重可达6公斤,通过更换挂架的方式方便集成飞思工业相机,倾斜摄影五拼相机,激光雷达,光电吊舱图传、航磁物探等多元化任务设备
起飞重量:起飞重量25kg,满足国内和国际相关适航标准
RTK/PPK:标配实时差分和事后差分两种模式同时使用,实时差分主要用于厘米级精准自主垂直降落,后期差分主要用于输出高精度POS数据,确保大量减免像控点
全域位置服务:云解算,免除基站点或中继点架设
模块化设计:大量使用插销、卡扣、自锁装置,飞机可拆为11部分,放进越野车
双GPS多冗余设计:确保飞行过程中若主差分GPS出现异常可以平滑切换到备份GPS,保障飞行顺利
双磁罗盘多冗余设计:确保飞行过程中若内置磁罗盘出现异常可以平滑切换到备份外置磁罗盘,保障飞行顺利
效率高:单架次航时可达6.4小时
姿态好:气动经过严格的风洞实验设计,飞行控制采用总能量自适应算法,两者确保姿态稳定,方便生成DLG成果
曝光同步:曝光同步模块确保曝光延时控制在10ms以内
自主产品:飞控系统和飞行平台均为纵横公司自主知识产权产品,并且有相关专利
传感器介绍
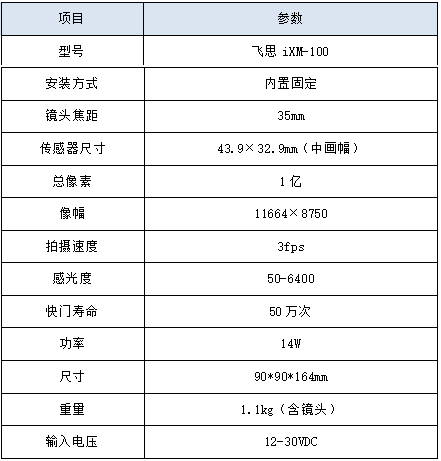
单镜头中画幅正射相机
 |  |
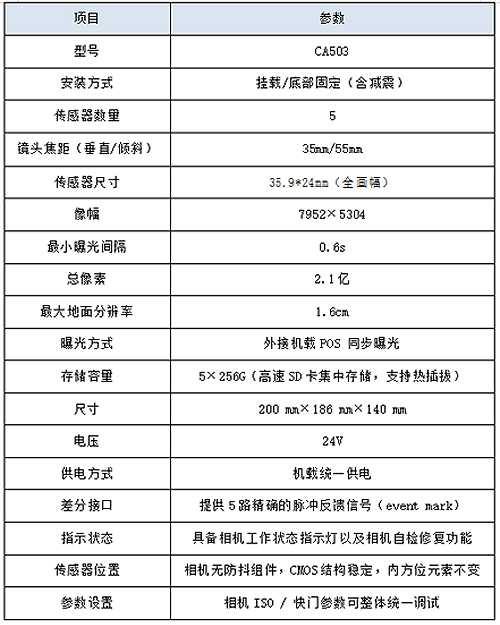
全画幅倾斜相机
 |  |
负载数据
MG-200S
MG-200S光电吊舱是JOUAV®自行研制的轻型光电吊舱载荷。该光电吊舱搭载了先进的30 倍无损光学变焦光学机芯和红外热像机芯,可对目标区域执行昼夜侦察和监视任务。
赋予全新生命力
自带高性能图形处理器,使用Nivida Jetson模块具备很高的性能和能效,可以运行现代 AI工作负载,并行运行多个神经网络,以及同时处理来自多个高清传感器的数据。
 |  |  |
| 赋予全新生命力 | 目标位置定位解算 | 目标图像跟踪 |
| 具备对视轴进行自动稳定的能力(两轴),保持画面的稳定。提高目标观察侦查效果,并可实时对目标进行拍照取证。 | 视频画面OSD 叠加无人机与目标坐标信息、系统状态信息,辅助操纵人员掌握态势,提高现场综合决策能力。 | 机载AI 辅助功能,实现对特定目标类型(例如车辆、船舶、建筑物等)的持续识别、标注、框选和追踪。 |
稳定的双传感器吊舱系统
除基础高精度自动飞行和双光视频实时回传之外,还具备多种电子增强处理、AI 目标识别定位和自动跟踪与引导飞行能力,以及预设线路与区域自动搜索功能。
实现对目标区域的昼夜监控
搭载非制冷焦平面热成像传感器,热像仪焦距 25 mm,拥有夜间目标侦测能力。通过热成像与可见光融合,无论白天黑夜,均能实现目标区域的实时监控,并可通过目标影像特征或目标锁表锁定目标并自动追踪。
| 主要规格 | 稳定平台类型 | 两轴两框架双光光电吊舱 |
| 收缩机构 | 配置具有轻型收缩机构以及匹配的减震器 | |
| 方位范围 | N×360°(方位不受限) | |
| 俯仰范围 | -130°至+90° | |
| 跟踪角速率 | ≥60°/s | |
| 可见光 | 像元数 | 1920×1080 |
| 变焦 | 30 倍光学变焦,12 倍数字变焦 | |
| 红外 | 热像仪类型 | 氧化钒非制冷平面 |
| 像元数 | 640×480 | |
| 热像仪光谱 | 8um至12um | |
| 焦距 | 25mm | |
| 记录 | 视频格式 | H.264 编码 TS. 封装 |
| 支持 | 设备支持 | CW-10 / CW-15 / CW-25 / CW-30 / CW-100 |
JoLiDAR
JoLiDAR系列产品是JOUAV®自主研发的激光雷达扫描系统,具有短距离测量、长距离测量等多款激光雷达产品。集成了激光扫描仪、GNSS高精度定位系统、惯性导航系统、全画幅相机、时间同步系统、数据存储系统等。整体集成度高、一体化控制、高精度配置、实时显示控制;支持无基准站、大测区、全域免像控功能;支持多卫星导航系统RTK+IMU松耦合、紧耦合方式,支持后处理功能、可快速生成高精度原始点云数据与真彩色点云。
多种集成 / 搭载方式
JoLiDAR激光雷达系统,具有“一套设备、多个平台、便捷拆装”的特点,支持纵横大鹏®CW-30垂直起降固定翼无人机、有人直升机、工业级旋翼机、汽车等搭载多平台。
LiDAR如何运作?
激光雷达系统主要包括雷达系统搭载平台、激光扫描仪、GNSS高精度定位系统、惯性导航系统、全画幅相机、时间同步系统、数据存储系统等。激光扫描仪用于测量发射点与地表反射物之间的相对距离,GNSS定位系统用于确定激光雷达发射点的空间位置,惯性导航系统用于测量激光雷达系统的姿态角度,时间同步系统将激光扫描仪、GNSS高精度定位系统、惯性导航系统统一到同一时间基准下。采集作业完成后,将激光雷达系统采集的原始数据经过软件融合处理后,即可得到高精度的三维点云数据和正射影像。
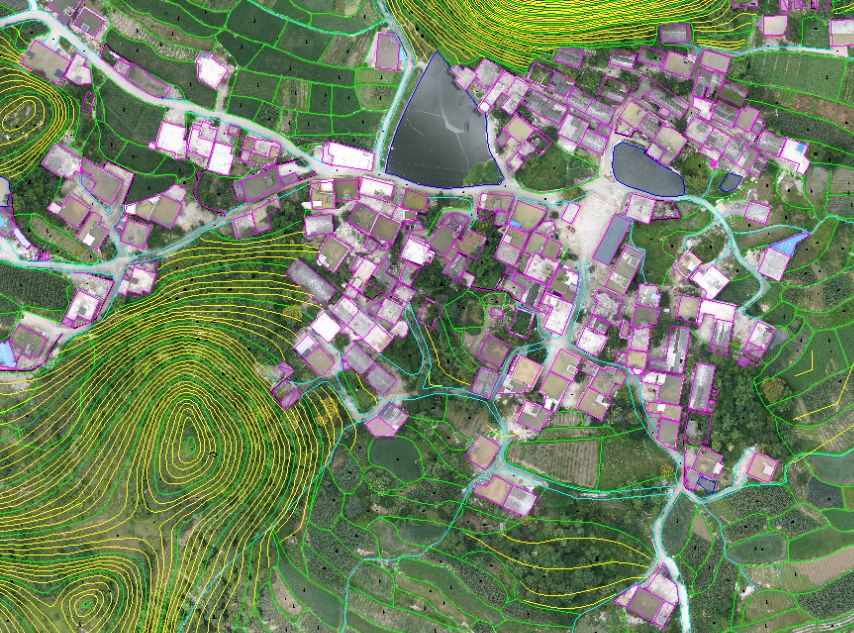
主要应用
与传统测绘技术相比, JoLiDAR完善的解决方案能使您快速获取、制作测区的成果数据。JoLiDA系统广泛应用于基础地形测绘、公路设计勘测、水库建设地形测量、高铁线路规划、应急灾害测量、电力巡检与自动驾驶、矿山测量等领域。
 | 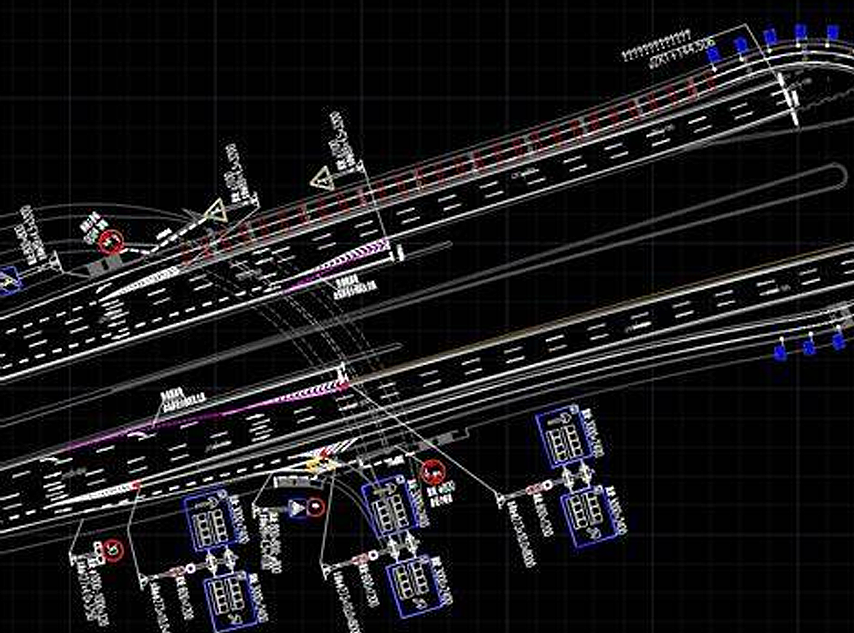 | 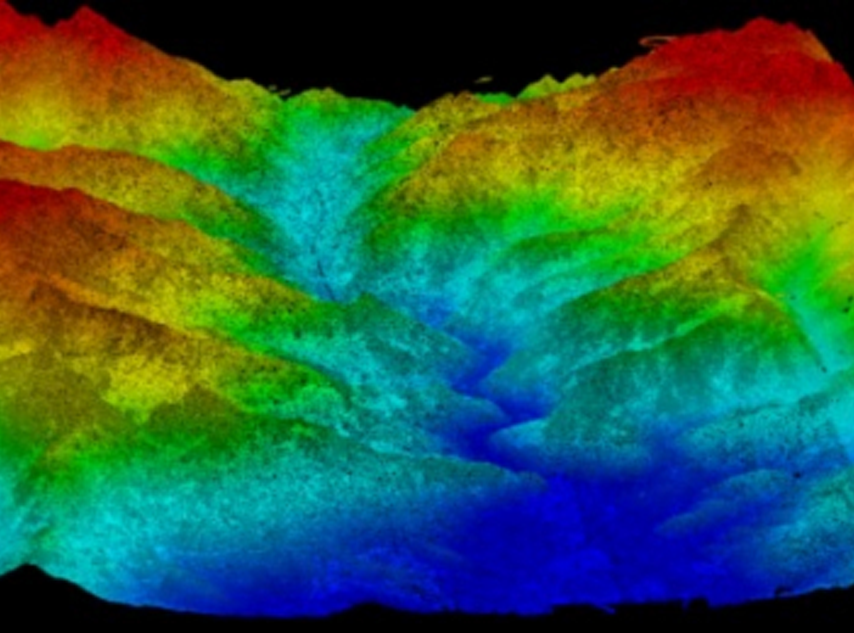 |
| 基础地形测绘 | 公路设计勘测 | 水库地形测量 |
| 效率高、精度高,能快速地得到测区的DEM、DLG等成果数据。 | 利用多回波技术,获取茂密树林下的地表点,提供公路基础地形数据。 | 地形复杂,采集水库区域的地形数据,制作DEM、DLG等成果数据。 |
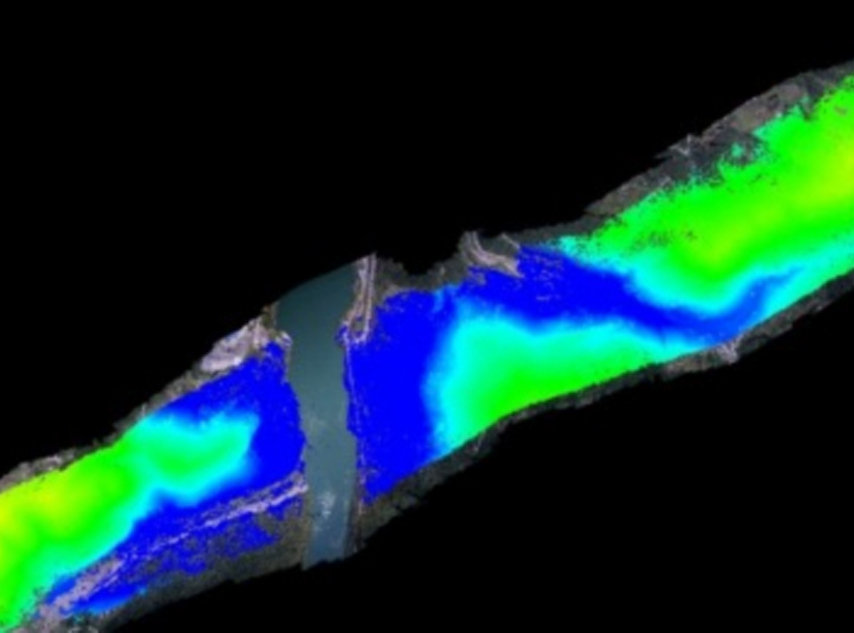 | 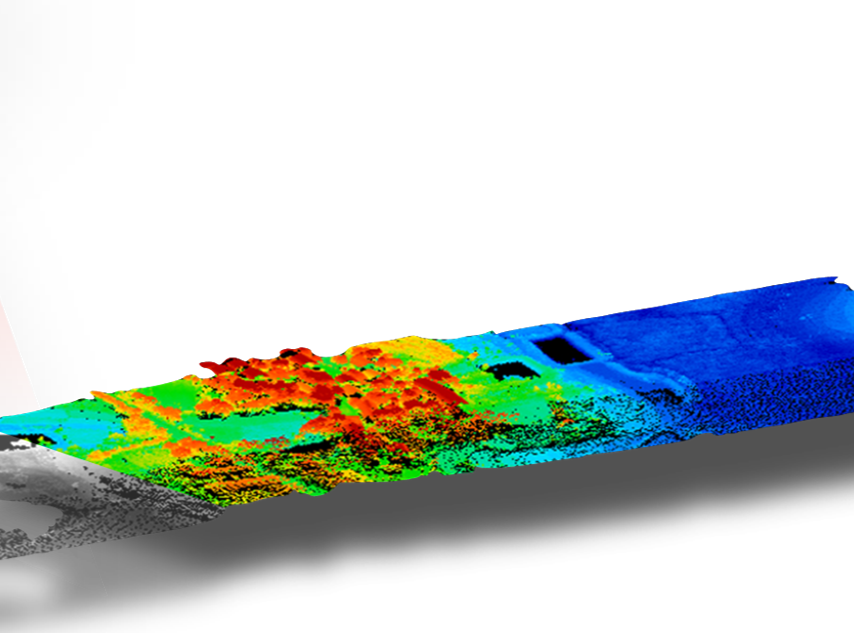 | 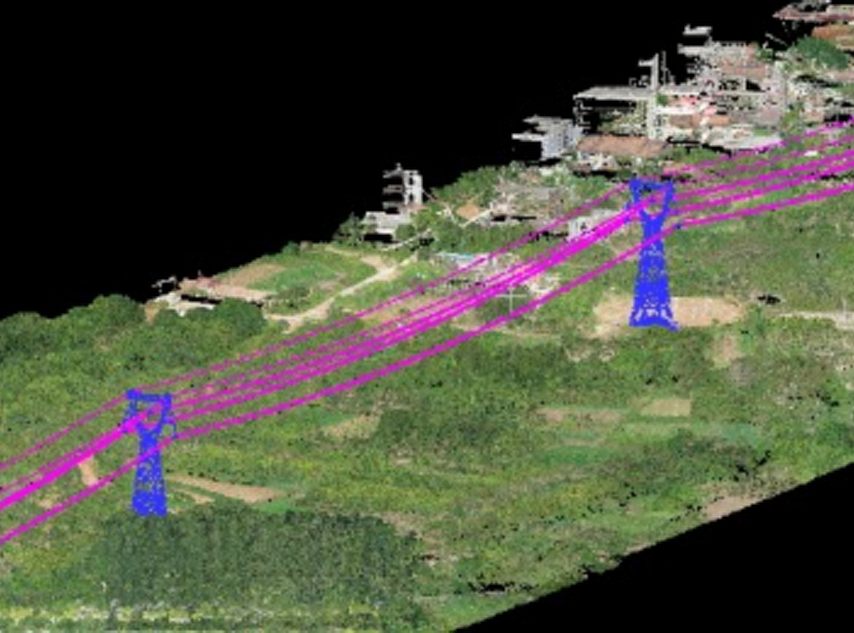 |
| 高铁线路规划 | 应急灾害测量 | 电力巡检与自动驾驶 |
| 快速获取线路周边的地形数据,为线路规划设计提供基础数据。 | 获取灾害位置的地形数据,为应急救灾部门提供受灾区域地形情况。 | 通过点云,计算电力线与植被间的危险点,并建立高精度电力走廊。 |