

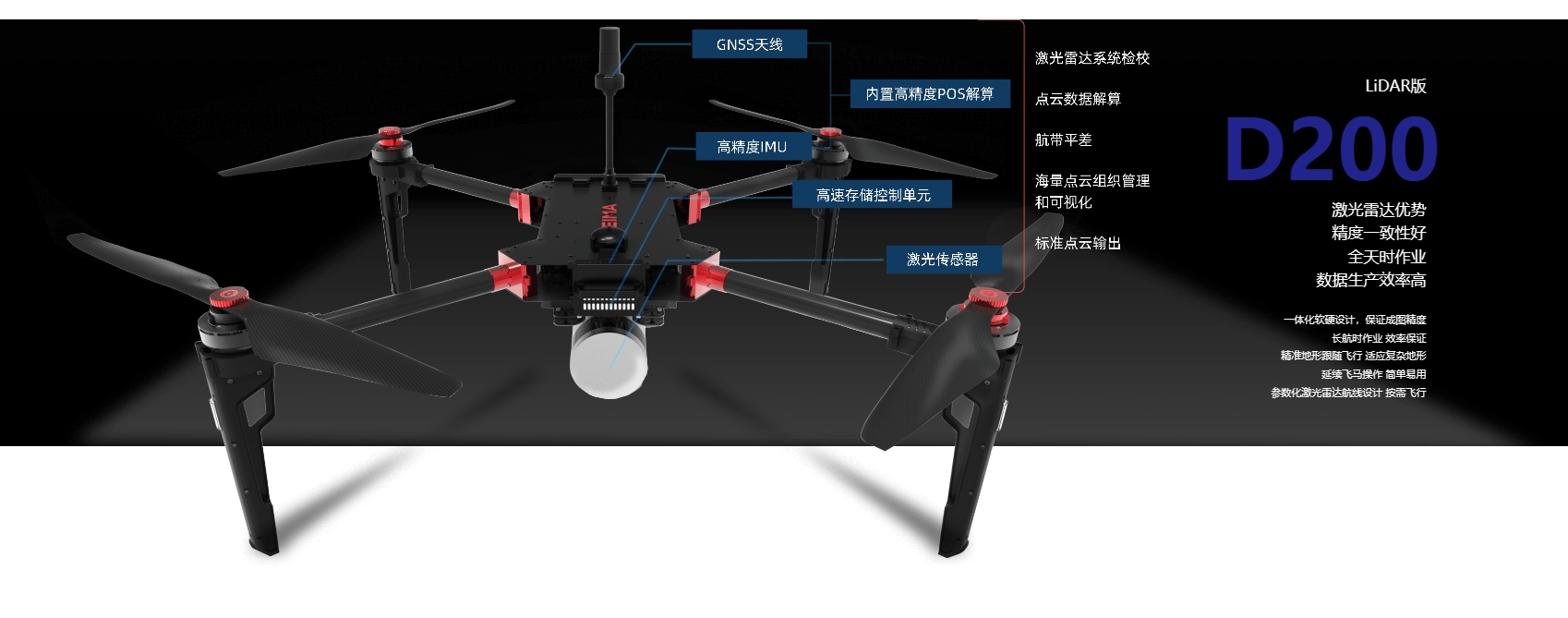
飞马智能航测系统D200

- 电动机:优效能、高可靠性、低振动、低噪音电动机。
- 智能电池:飞马专用智能电池模块,可轻松查看电池电量等参数,了解电池工作状态;创新的电池保护方案,具有空中、地面两种保护逻辑,合理、有效地保障电池使用;三电池并联供电系统,在两块电池故障的情况下亦可使飞机执行降落任务,提高飞行安。全性。
- 螺旋桨:专业的气动外形设计与精湛的加工工艺,保障了螺旋桨的性能与品质;无需工具便可实现螺旋桨快速拆装,便捷可靠。
- 增稳云台:拍照、录制更稳定
- 碳纤维机臂:机臂可快速折叠,整机可收纳在专用包装箱中,方便运输。
- GNSS基站:飞马软件的易用性,配套GNSS基准站,带来简单可靠的用户体验。
自动驾驶仪
基于模型的飞行控制律
先进的多传感器数据融合算法
冗余传感器设计、提高飞行安.全性
实时故障检测与故障隔离算法
高精度航姿测量系统
全自动的任务方式
优效的嵌入式软件系统,模块化设计,支持多种载荷
支持RTK、PPK及其融合作业模式,提供厘米级定位精度
安.全机制

D-EOV100视频模块
| 云台 | 三轴增稳云台 |
| 视频分辨率 | 1920X1080 |
| 视频帧率 | 25fps |
| 变焦倍数 | 30倍光学变焦 |
| 编码格式 | H.264 |
| 图传频段 | 2.3GHz~2.7GHz |
| 图传带宽 | 10MHZ |
| 传输距离 | 10km |
D-CAM300航测模块
| 云台 | 两轴增稳云台 |
| 相机 | SONY RX1RII |
| 传感器尺寸 | 35.9×24mm |
| 有效像素 | 4200万(7952X5304) |
| 镜头参数 | 35mm(定焦) |
D-OP200倾斜模块
| 云台 | 两轴增稳云台 |
| 相机 | SONY DSC-RX0 |
| 相机数量 | 5 |
| 传感器尺寸 | 1英寸(13.2x8.8mm) |
| 有效像素 | 1500万(4800x3200)x5 |
| 镜头参数 | 7.7mm(等效焦距24mm) |
D-OP300倾斜模块
| 相机数量 | 5 |
| 传感器尺寸 | 23.5×15.6mm |
| 相机倾斜角度 | 45° |
| 有效像素 | 2400万x5 |
| 镜头参数 | 中间25mm,四周四个相机35mm |
| 重量 | 1.45kg |
支持RTK免相控
D-LiDAR100模块
| 激光器 | Velodyne Puck | ||
| 通道数 | 16 | 点频 | 300kpts/s |
| 测量距离 | >100m | 测距精度 | ±3cm |
| 回波数量 | 2(Strongest, Last) | 扫描速度 | 5~20Hz |
| 垂直测角 | 30°(+15°~-15°) | 回波强度 | 8bit |
| 波长 | 903nm(Class 1) | 激光发散角 | 3.0×1.2mrad |
| 视场角-水平 | 360° | 分辨率-水平 | 0.1°~0.4° |
| 视场角-竖直 | 30°(+15°~-15°) | 分辨率-竖直 | 2.0° |
D-LiDAR200模块
| 激光器 | RIEGL mini VUX-1UAV | ||
| 通道数 | 1 | 点频 | 100kpts/s |
| 测量距离 | >250m | 测距精度 | ±1cm |
| 回波数量 | 5(Max.) | 扫描速度 | 10~100Hz |
| 回波强度 | 16bit | 波长 | 905nm(Class 1) |
| 激光发散角 | 1.6×0.5mrad | 视场角-水平 | 360° |
| 分辨率-水平 | 0.05~0.5° |
D-EOV100视频模块
| 云台 | 三轴增稳云台 |
| 视频分辨率 | 1920X1080 |
| 视频帧率 | 25fps |
| 变焦倍数 | 30倍光学变焦 |
| 编码格式 | H.264 |
| 图传频段 | 2.3GHz~2.7GHz |
| 图传带宽 | 10MHZ |
| 传输距离 | 10km |
行业应用
- 高精度地形测绘:地形测绘、工程勘察、城市规划、国土调查
- 高精度点云数据:工程勘察、矿山监测、电力巡线、地形测绘
- 高精度三维建模:应急监测、文物保护、BIM应用、数字城市
一站式软件支持
三维航线规划,让设计变得简单可靠
技术参数
外形尺寸
| 展开 | 830x732x378mm | 折叠 | 955x362x378mm |
| 对称电机轴距 | 988mm | 外包装尺寸 | 1038x475x366.5mm |
飞行参数
| 巡航速度 | 13.5m/s | 导航卫星 | GPS:L1+L2(20Hz) BeiDou:B1+B2(20HZ) GLONASS:L1+L2(20Hz) |
| 差分模式 | PPK/RTK及其融合作业模式 | 悬停精度RTK | 水平1cm+1ppm;垂直2cm+1ppm |
| 空机重量 | 6.5kg | 起飞重量 | 8.5kg |
| 续航时间 | 48min(单架次单相机挂载海平面悬停时间) | 测控半径 | 5KM(可远至20KM) |
| 抗风能力 | 5级(正常作业可大至 6级) | 爬升速度大至 | 10m/s |
| 下降速度可至 | 8m/s | 实用升限高度 | 海拔4500m |
| 起降方式 | 无遥控器垂直起降 | 工作温度 | -30~50 °C |
| 任务响应时间 | 展开≤10min,撤收≤15min |
D-CAM210航测模块
| 云台 | 两轴陀螺增稳 | 相机型号 | SONY ILCE-6000 |
| 传感器尺寸 | 23.5x15.6mm | 有效像素 | 2400万(6000*4000) |
| 镜头焦距 | 20mm(定焦) | 相机重量 | 886.5g |
D-CAM310航测模块
| 相机型号 | SONY ILCE-6000 | 传感器尺寸 | 23.5×15.6mm |
| 有效像素 | 2400万(6000*4000) | 镜头焦距 | 20mm(定焦) |
| 云台 | 两轴陀螺增稳 |
D-LiDAR210模块
| 扫描角 | 360°内可调 | 扫描速度 | 10-100线/秒 |
| 点频 | 100khz | 激光分散角 | 1.6×0.5mrad |
| 激光等级 | I 级,人眼安.全 | 扫描机制 | 旋转棱镜 |
| 回波次数 | 五回波 | 角度分辨率 | 0.001° |
| 回波信号强度 | 16 bits | 测量距离 | 250m(>60%反射率);330m(>80%反射率) |
| 测量精度 | 5cm | IMU参数 | 测角精度优于0.01° |
| 激光器通道数 | 1 |
D-LiDAR300模块
| 扫描角 | 360°内可调 | 扫描速度 | 10-100线/秒 |
| 点频 | 100khz、200khz | 激光分散角 | 1.6×0.5mrad |
| 激光等级 | I 级,人眼安.全 | 扫描机制 | 旋转棱镜 |
| 回波次数 | 五回波 | 角度分辨率 | 0.001° |
| 回波信号强度 | 16 bits | 测量距离 | 330m |
| 测量精度 | 5cm | IMU参数 | 测角精度优于0.01° |
| 激光器通道数 | 1 |
D-EOV100视频模块
| 视频分辨率 | 1920X1080 | 视频帧率 | 25fps |
| 变焦倍数 | 30倍光学变焦 | 编码格式 | H.264 |
| 图传频段 | 2.3GHz~2.7GHz | 图传带宽 | 10MHZ |
| 传输距离 | 10km | 云台 | 三轴增稳云台 |
D-OP320倾斜模块
| 相机型号 | Sony A6000 | 传感器数量 | 5个 |
| 传感器尺寸 | APS-C(23.5*15.6mm) | 倾斜角度 | 45° |
| 有效像素 | 1.2亿(2400万*5) | 像素镜头焦距 | 下视25mm ,斜视35mm |
| 相机供电 | 支持机载供电 | 相机重量 | 740g |
D-OP410倾斜模块
| 相机型号 | A7R3 | 传感器数量 | 5个 |
| 传感器尺寸 | 35.9mm* 24mm | 倾斜角度 | 45° |
| 有效像素 | 2.1亿(4200万*5) | 像素镜头焦距 | 下视40mm ,斜视56mm |
| 相机供电 | 支持机载供电 | 相机重量 | 1440g |
D-TIRC110热红外遥感模块
| 传感器型号 | FLIR VUE Pro | 传感器尺寸 | 10.88mm×8.704 mm |
| 像元尺寸 | 17μm | 热灵敏度 | <50 mk@ f/1.0 |
| 有效像素 | 32 万像素(640*512 | 镜头参数 | 13mm 定焦 |
| 光谱范围 | 7.5-13.5μm | 探测器类型 | 焦平面阵列(FPA) 非制冷氧化钒(VOx)微测辐射热计数据 |
| 采集帧率 | 9hz,14-bits 影像采集 | 采集数据分辨率 | 20cm(13mm定焦,@150米高) |
D-TIRV100热红外视频模块
| 云台 | 三轴陀螺增稳 | 外观尺寸大至 | 115.6*162.8*120.8(mm) |
| 俯仰角度 | +80°至-140 ° | 滚转角度 | ±60° |
| 平转角度 | ±320° | 机芯型号 | UPA640CX-B02 |
| 探测器类型 | 非制冷焦平面 | 探测元 | 640*480(有效像素),17μm |
| 工作波段 | 8μm~12μm | 功耗 | ≤1.5W@25℃@10V稳态 |
D-LiDAR150激光雷达模块
| 扫描角 | 可至 360° | 扫描速度 | 10/20线/秒 |
| 点频 | 720kHz | 激光器通道数 | 40 |
| 激光等级 | I 级,人眼安.全 | 回波次数 | 双回波 |
| 角度分辨率 | 0.2°(10Hz):0.4°(20Hz) | 垂直视场角 | 40°(-25°~+15°) |
| 回波信号强度 | 8 bits | 测量距离 | 200m |
| 测距精度 | ±2cm | 航向角精度 | 0.03° |
| IMU参数 | 测角精度优于0.01° |
D-LiDAR160激光雷达模块
| 扫描角 | 可至 360° | 扫描速度 | 10/20线/秒 |
| 点频 | 720kHz | 激光器通道数 | 40 |
| 激光等级 | I 级,人眼安.全 | 回波次数 | 双回波 |
| 角度分辨率 | 0.2°(10Hz):0.4°(20Hz) | 垂直视场角 | 40°(-25°~+15°) |
| 回波信号强度 | 8 bits | 测量距离 | 200m |
| 像素 | ≥2000万 | 像元大小 | 3.9μm |
| 镜头焦距 | 25mm | 测距精度 | ±2cm |
| 航向角精度 | 0.03° | IMU参数 | 测角精度优于0.01° |
D-MSPC100多光谱模块
| 重量 | 232g(包括DS和线缆) | 尺寸 | 87mm*59mm*45.4mm |
| 外部电压 | DC4.2V~15.8V | 额定功率 | 4W |
| 峰值功率 | 8W | 光谱波段 | 蓝、绿、红、红边、近红外 |
| 输出 | 全局快门,与所有波段匹配 | 空间像素 | 120m,8cm/像素(每个波段) |
| 采样帧率 | 1次/秒(所有波段),RAW12-bits | 输入端口 | 串口,10/100/1000以太网,可拆卸WIFI模块,外触发,GPS,SDHC |
| 视场角 | 47.2°HFOV | 波段 | 400nm—900nm(QE of 10% at 900nm) |
D-HSPC100高光谱模块
| 通道数 | 125 | 采样间隔 | 4nm |
| 光谱分辨率 | 8nm@532m | 高光谱成像速度 | ≥5 Cubes/s |
| 镜头焦距 | 16mm | 波段 | 450nm—950nm |
相关推荐










