

华测P560H无人机
P560H六旋翼无人机航拍测绘系统,采用高强度全碳纤维材质,机身设计新颖、轻巧,体积小、重量轻、飞行平稳、机动灵活、空中阻力小、目标特性小、飞行噪音低等特点,非常适合城镇夜间,环境比较恶的环境,人员密集场所飞行。
P560H 六旋翼无人机
P560H六旋翼无人机航拍测绘系统,采用高强度全碳纤维材质,机身设计新颖、轻巧,体积小、重量轻、飞行平稳、机动灵活、空中阻力小、目标特性小、飞行噪音低等特点,非常适合城镇夜间,环境比较恶的环境,人员密集场所飞行。
P560H六旋翼无人机航拍测绘系统使用快捷方便,不太需要过多的技术训练就可以进行简单,稳定的飞行,甚至可实现“单兵作战”——即单人操作。在地质探测、遥感测绘、通讯中继、环境保护、气象探测、灾害监测、航测、线路、管道巡检,城市巡查,空中指挥支援,群体事件控制等方面有着广泛的应用。
(一)机体:P560H六旋翼无人机航拍测绘系统的机身采用质量轻,强度高的碳纤维制成,机身连接部件全部采用7050铝合金CNC制成,实现可以快拆、方便携带,在很大限度的减轻了机身重量的同时,保证了机身的结构强度。飞机整体可防≧IP64降雨,可以保证其在雨天情况下正常工作。经多次测试,P560H六旋翼无人机航拍测绘系统在正常作业高度,速度摔落后,高强度,高韧性的机体完全不会出现变形,断裂等损毁情况。高强度的机身更能保证机载设备可靠地运行,为您更加顺利的工程应用,奠定了坚实的基础。
(二)动力系统:P560H六旋翼无人机航拍测绘系统的动力系统由防水无刷电机、防水无刷控制器和螺旋桨组成:
无刷电机采用定制化、效率高的盘式无刷电机,动力输出强劲,功耗低,振动小且具有防水能力,保障无人机的可靠性。可在高速状态下长时间工作。
无刷控制器采用了防水型高速调速器,具有调速迅速,发热量低及防水防尘的功能,保障无人机处于恶劣环境中的正常工作。
螺旋桨采用的是优质29寸碳纤维空心螺旋桨,高强度复合材料,同等高转速下,产生的升力越大。
(三)飞控系统:飞控系统分为主控部分和定位系统部分及数据传输部分:
(1)主控部分采用MP-201M飞控,该飞控集成高精度RTK差分系统,可以保障在测绘行业高精度的数据记录工作,且主控设备舱具有恒温功能,保障在低温环境中,主控的正常工作能力,设备舱采用了屏蔽接地措施,以避免受外界干扰。
该飞控具备的功能有:
1)自稳飞行(飞控辅助平衡功能,简化飞手操作难度);
2)GPS定点飞行(使用GPS定位功能,进一步简化操作难度,保障无人机在恶劣环境下的飞行性能);
3)地面站导航功能(可以通过数据传输设备,在地面基站设定所需要的航线及飞行高度,飞行速度,由飞控自主起飞并按设定规划的航线自主飞行,飞行结束后飞机依据设置可自动返回起飞点降落或在之后飞行航点自行降落及悬停等待命令);
4)失控返航功能(在无人机失去控制信号后,无人机会自动返回起飞点并自主降落或手动降落);
5)返航功能(当无人机飞出视线或任务完成,需要回航时,该功能可以自主返回起飞点并降落);
6)黑匣子功能(用于无人机每次飞行时飞控的工作状态、电池性能、地面基站所发出的每步指令及遥控器发出的每步指令的记录,便于后期分析)。
以上功能为该飞控常规功能,但不局限于以上六项。
(2)P560H六旋翼无人机航拍测绘系统采用的是目前先进的定位系统;该定位模块具有同时采集GPS信号及高精度RTK数据,且采用双定位系统,具有同主控双处理器功能一样,在其中一个定位模块发生故障后,立即自主转换至备用模块进行工作。
产品说明
行业应用方向
三维数据可视化已成为当今城市基础建设、规划、环境保护、交通和通讯等方面的重要环节,是当前数字城市的重要表现手段,也是当今智慧城市发展的重要基础数据设施。
项目应用案例
以上海西虹桥北斗产业园为例,运用五镜头倾斜摄影吊舱快速采集信息构建三维模型。
项目实施方法
1.低空影像采集设计方案
本摄区采用P560H旋翼飞机搭载五镜头吊舱,设计航高150米,前向重叠度为80 %,侧向重叠为70 %,相机焦距20mm,总像素大于1亿
控制点采集
影像处理
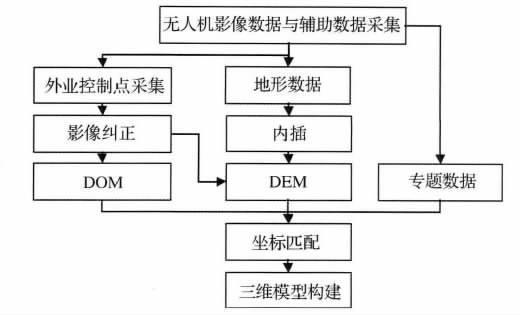
2.城市三维建模构建
通过摄影测量同时获取的DEM和 DOM构建三维模型和采用地形数据内插DEM与摄影测量生产的 DOM叠合构建三维模型,并与相关专题数据合成的技术流程
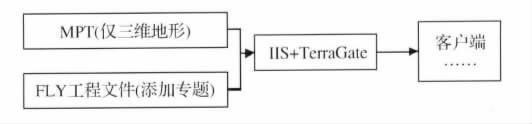
3.基于无人机影像的城市三维集成技术流程
这里,我们选择Context Capture来搭建和展示整个三维场景,步骤如下:
建模对象:静态物体
辅助信息:传感器属性、照片位置姿态参数、控制点等等
计算过程:空三、重建阶段的参数设置
输出结果:带有真实纹理的三维格网模型(实景真三维模型)
三维模型展示
 三维模型流程
三维模型流程
结论
利用 0.2m无人机高分辨率影像数据,基于Context Capture Setting任务序列设置生产需要的空三,采用 Context Capture SceneComposer编辑场景,获取了该区域地表三维模型,为基于无人机快速建立三维地表模型积累宝贵经验。
Context Capture平台支持下,基于多张倾斜摄影的无人机影像自动提取建筑物表面纹理,从而避免大量的实地考察工作量,降低工作强度,提高作业效率,更重要的是实现建筑物三维重建的真实纹理。
技术参数
地面站系统:
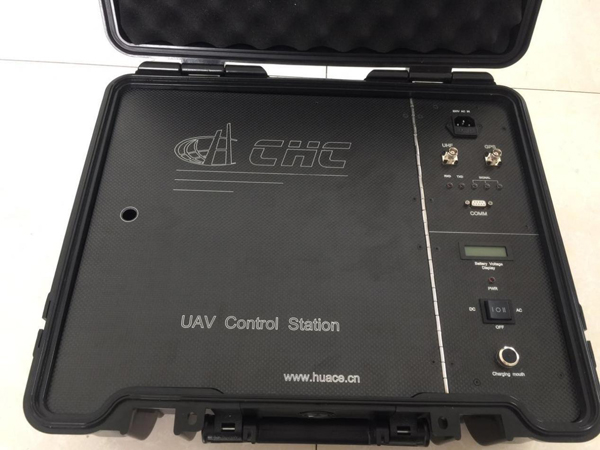
地面站参数:
地面站外形尺寸:520*440*200mm
内置电池:3S1P10000毫安时
工作时间:8小时以上
地面站介绍:
数据传输模块及地面一体基站,具有防水、防震、防高低温,方便携带等。采用900MHz模块及工程级地面基站。数传模块具有跳频技术,很大限度的避免同频干扰。该模块的有效传输距离为:城市为10KM;野外空旷区域为20KM。地面基站的功能具有视讯接收及监视功能,航线规划功能,无人机当前点定位功能。地面站支持外场汽车充电、支持室内平衡充充电。
机体技术参数:
P560H | |
机体 | |
对称电机轴距 | 1550mm |
单臂长度 | 820mm |
机身直径 | 550mm |
起落架尺寸 | 跨距630mm 高度400mm |
电机 | |
定子尺寸 | 81mm |
KV值 | KV170 |
功率 | 1800W/轴 |
电调 | |
工作电流 | 80A |
工作电压 | 25V |
驱动PWM频率 | 600Hz |
螺旋桨 | |
材质 | 碳纤维 |
尺寸 | 29英寸 |
飞行参数 | |
起飞重量 | 20kg |
有效载荷 | 10kg |
图传模块 | 标清图传(可选配高清图传) |
飞行时间 | 空载70分钟,标准载荷50分钟 |
遥控距离 | 3-5公里(10公里) |
飞行高度 | 5000m |
抗风能力 | 6级 |
电池电量 | 22.2V 22000mAh |
工作温度 | -20℃至40℃ |








