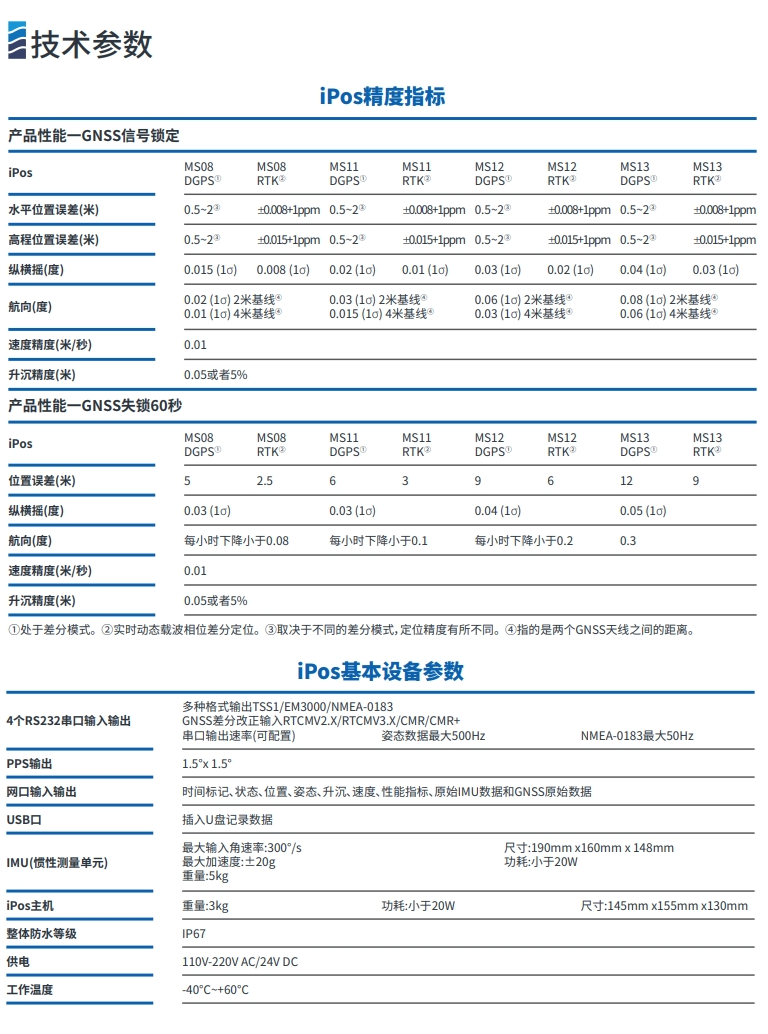
中海达iPos MS11/13惯性组合导航系统
高精度IMU/GNSS惯性组合惯导系统,内置陀螺、加速度计及GNSS高精度板卡并通过算法深度融合,生成高精度高频率的全自由度数据 - 速度、速度、姿态航向,升沉,位置。
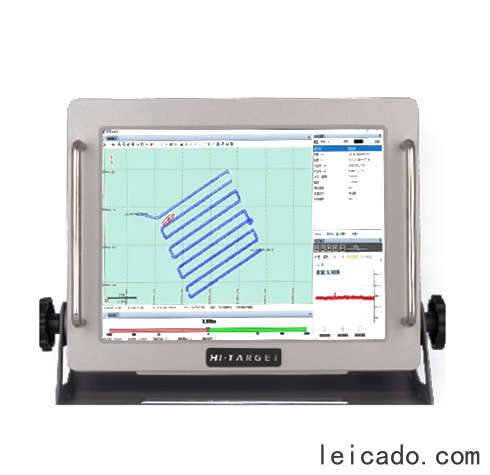
iPos MS系列是综合性的船载定位定姿系统。产品内置陀螺仪、加速度计和GNSS板卡,并深度融合,生成高 精度的定位定姿数据。iPos MS系列能够提供准确的位置参考和运动补偿,是完成多波束测量、船载移动测 量等应用的理想工具 。
- 高抗震性设计
抗震结构设计,可适应恶劣的环境。
 |  |  |
| 光纤陀螺(MS11) | MEMS陀螺(MS13) | |
| 光纤陀螺,高精度姿态测量 | MEMS陀螺,小巧轻便, 适合多波束内置集成。 |
- 精准航向精度
精密标定及误差补偿技术,可实现高精度的捷联解算;优化的升沉测量算法,可实现高精度实时升沉测量和延迟升沉输出。
 |  |  |
| 双结合算法 | 全自由度数据输出 | |
| 卡尔曼滤波和紧耦合算法, 可有效解决定位失锁状态下 的定位问题。 | 全自由度信息输出, 高速率输出位置、姿态、升沉、航向信息。 |
系统特点
抗震结构设计,适应恶劣的环境
高频信息输出,在动态环境下表现优越
全自由度信息输出,一次性输出位置、姿态、升沉、航向信息
惯性导航和GNSS导航信息深度耦合,适应GNSS失锁的复杂环境
灵活的差分方式,支持多种差分纠正
精准、快速、稳定的航向精度
优化的升沉测量算法,实现高精度的升沉测量
模块化设计,维护方便
中海达完善的售后服务体系,可提供完善的、多层次的技术 支持及充分的 售后保障。
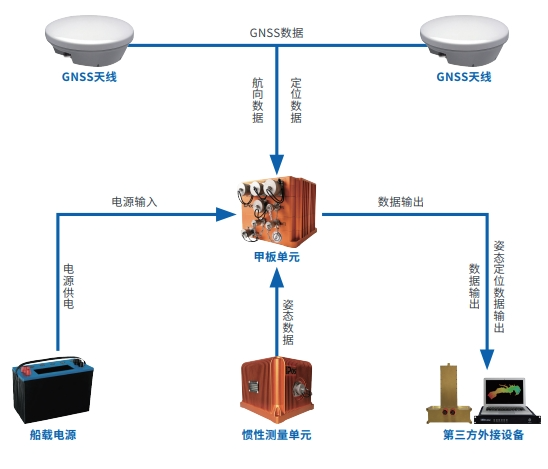
系统组成
iPos由惯性测量单元(IMU),甲板单元,两个GNSS天线组成。
●甲板单元 内置控制程序和算法。 ●惯性测量单元IMU 由三个高精度的陀螺仪和三个高精度的加速度计组成。 ●两个GNSS天线 实现定位定向。
应用领域
 |  |  |  |
| 多波束测绘 | 海上工程 | 水下机器人定位定姿 | 航空测绘 |
 |  |  |  |
| 车载移动测量 | 船载移动测量 | 水面无人艇 | 水面舰艇定位定姿 |