
无人机高压线监测
1.应用背景
具有施工后离线检测以及施工中的在线检测功能。
2.特色优势
不需要业主方提供任何坐标尺寸等信息,独立自主完成测量工作;非接触式测量,不对业主方产生任何干扰。
3.工作原理
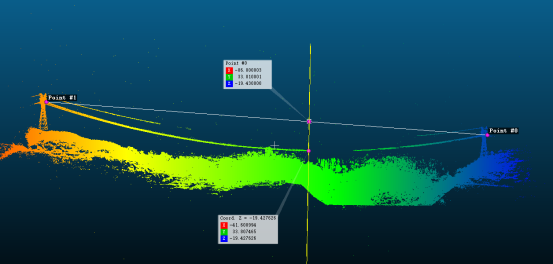
无人机搭载多线激光雷达,在机载计算机程序处理下,能够实时定位和建图,其中,所建三维地图采用局部坐标系,坐标原点是无人机通电位置。正下方为X轴,正前方为Y轴。无人机降落后,三维地图构建完毕,可通过有线以太网或者无线WiFi下载数格式为PCD的数据文件,通过软件打开模型可以通过鼠标拾取模型中所有的点,标注其相对坐标,用户实际使用过程中,着重关注悬挂点、基座、ZUI高点、线缆ZUI低点等信息。在离线处理场景下,通过悬挂点到高压线缆ZUI低点的差值即可计算出弧垂度。
在得到悬挂点与参考地面的高度之后,可以进一步实时计算动态弧垂。将无人机放置于弧垂ZUI低点附近,通过系留方式对无人机进行不间断供电。激光雷达采集到的线缆动态点云数据通过电力线载波通信的方式传输到地面基站以及工作站电脑上,工作站安装专用软件,可输入悬挂点、参考地面的高度,然后与实时点云的ZUI小值进行比较,得到实时弧垂度
值得注意的是,为了增加实时观测线缆的长度,需要无人机距离线缆一定的距离,在保障线缆能够被雷达测量到的前提下,提供足够大的视角。如果视窗中的线缆呈现单调下降或者单调上升态势,说明需要调整无人机的位置,保证采集得到ZUI低点位。
本文版权归网站所有,转载请联系并注明出处:
http://www.natgod.com/article-detail/W46yKGOB

