
水准测量的主要误差来源及精度控制要点
为避免由于水准测量的读数和计算不熟练而导致大而不易发现的错误,我们需要熟悉水准测量的基本原理、误差来源及计算方法。
由于目前全站仪所测高程存在仪器高丈量误差、棱镜高丈量误差、大气折光误差等,不易控制。然而,水准仪只需控制好前后视距差,误差便会很小。因此,在桥梁施工测量中,关键部位的高程控制需要使用水准仪来进行测量。
然而,为避免由于水准仪测量的读数和计算不熟练而导致大而不易发现的错误,我们需要熟悉水准测量的基本原理、误差来源及计算方法。
水准仪测量的原理是利用仪器获取水平视线。
误差来源主要是由于水准仪获取的视线不水平所导致的,这个不水平的误差被称为i角。为控制i角,需要控制好前后视距差。
为控制水准测量的误差,我们应注意以下几点:
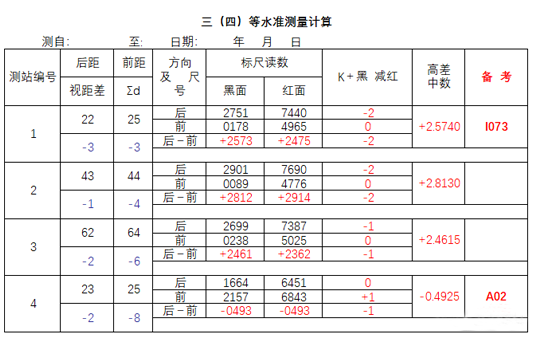
1. 前后视距差应小于3米;
2. 转点时要踩紧尺点,并擦拭标尺底部的尘土;
3. 读数要准确,黑面和红面的读数差异不能超过3mm;
4. 记录要按照规范进行;
5. 需要进行附合水准和闭合水准的测量(闭合水准是指从点I078出发测一圈后回到点I078,附合水准是指从点I078出发测到点A02);
6. 在现场进行快速计算,在计算完高差后再进行换站;
7. 标尺要保持立直(通过观察气泡);
8. 水准高差的计算应使用卡西欧计算器,避免使用心算或手机计算。
对于自动安平水准仪,要使用相应的计算和记录格式。
以上都是适用于护筒标高、垫石标高和控制测量的记录方式,如果有任何不理解的地方,请随时联系小编。切记在后期工作中避免过多、过频繁地使用水准测量,要熟能生巧,以避免返工和复测的情况发生。
南京莱佳德提供测绘仪器以旧换新,测绘仪器维修,测绘仪器代检,全站仪租赁销售,无人机 无人船、三维扫描仪、工程测量业务承接。 需要购买全站仪、GPS/RTK/GNSS接收机、无人机、无人船 、水下无人机、水准仪、经纬仪、管道探测等测绘仪器设备,或有测绘仪器相关问题及测绘工程类的业务可以联系南京莱佳德(natgod.com)。
版权说明|莱佳德科技南京有限公司尊重原创,图片和文章的版权为原作者所有,若有侵权请联系本单位,我们会及时声明或删除。

