
无人机的工作原理您了解吗?
无人机能够悬停在空中,也可以沿着任意轴调整飞行姿态(抚养、翻转、偏航);甚至能够做精密圆周运动。
众所周知,无人机能够悬停在空中,也可以沿着任意轴调整飞行姿态(抚养、翻转、偏航);甚至能够做精密圆周运动。
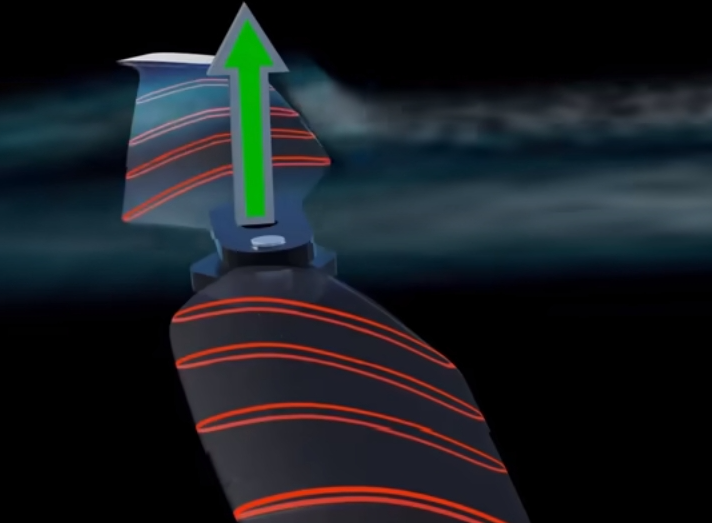
 无人机动力源来自无刷直流电机,简称bldc,螺旋桨叶片是空气动力学设计,配合电机的动力产生升力,仔细看看螺旋桨上方是弧形设计,当空气流过横截面,就会产生升力,原理就是压缩空气。上方流速大于下方流速,把空气拼命向上推,压差产生向上的力,无人机就会上升。
无人机动力源来自无刷直流电机,简称bldc,螺旋桨叶片是空气动力学设计,配合电机的动力产生升力,仔细看看螺旋桨上方是弧形设计,当空气流过横截面,就会产生升力,原理就是压缩空气。上方流速大于下方流速,把空气拼命向上推,压差产生向上的力,无人机就会上升。
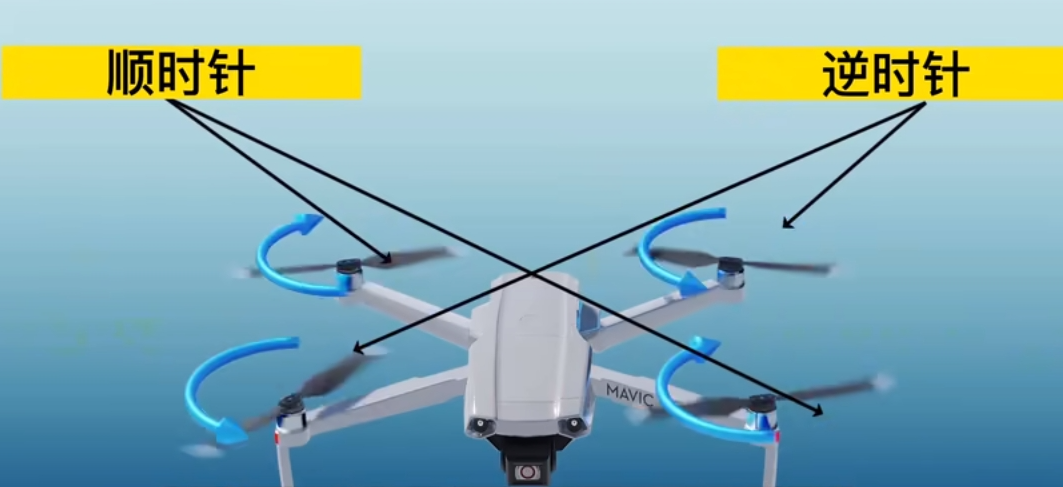
 (机身)内部会有控制器,控制电机转动速度,转速越快,升力越大,当无人机起飞时 只需增加旋翼速度,四块叶片产生的集体升力,克服重力做功,升力大于无人机从地面升起的重量就会上升,这叫爬升阶段 当达到既定高度,通过内部的控制器调节旋翼速度,当升力平衡于无人机的重量,这时候就能够滞空悬停,无人机悬停的时候,四个螺旋桨都以相同的速度旋转,会发现对角螺旋桨朝一个方向旋转,而另一对朝另一个方向旋转,这是因为如果所有螺旋桨都朝着同一个方向旋转,无人机机身就会朝相反的方向旋转,为什么会这样呢?
(机身)内部会有控制器,控制电机转动速度,转速越快,升力越大,当无人机起飞时 只需增加旋翼速度,四块叶片产生的集体升力,克服重力做功,升力大于无人机从地面升起的重量就会上升,这叫爬升阶段 当达到既定高度,通过内部的控制器调节旋翼速度,当升力平衡于无人机的重量,这时候就能够滞空悬停,无人机悬停的时候,四个螺旋桨都以相同的速度旋转,会发现对角螺旋桨朝一个方向旋转,而另一对朝另一个方向旋转,这是因为如果所有螺旋桨都朝着同一个方向旋转,无人机机身就会朝相反的方向旋转,为什么会这样呢?
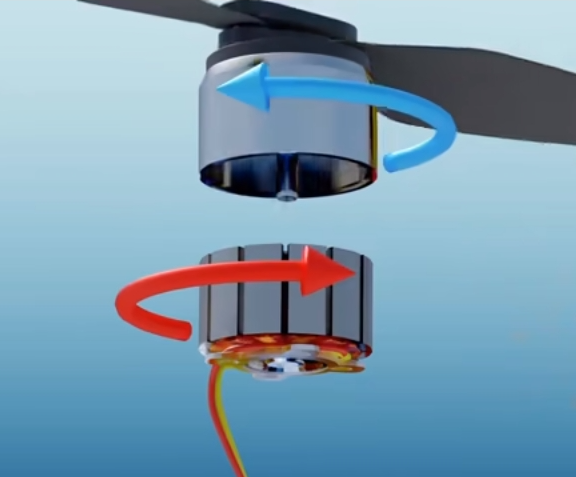
 大家知道电机的定子连接到无人机机身,转子转动是因为它接收了来自点子的扭矩,根据牛顿第三运动定律,两个物体之间的作用力和反作用力,总是大小相等、方向相反;所以如果转子从定子接收扭矩,定子也将承受等量的扭矩,且与转子方向相反,如果所有转子都在相同的方向旋转,无人机机身将承受反作用力矩,然后这四个反作用力将迫使无人机机身转动。
大家知道电机的定子连接到无人机机身,转子转动是因为它接收了来自点子的扭矩,根据牛顿第三运动定律,两个物体之间的作用力和反作用力,总是大小相等、方向相反;所以如果转子从定子接收扭矩,定子也将承受等量的扭矩,且与转子方向相反,如果所有转子都在相同的方向旋转,无人机机身将承受反作用力矩,然后这四个反作用力将迫使无人机机身转动。
所以通过两组旋转螺旋桨的相反转动抵消扭矩,反作用力矩为零,无人机就不会旋转了,巧妙的是,通过控制两对螺旋桨的作用力与反作用力,就能够实现无人机的偏航运动,也就是调转方向,一组对角螺旋桨与另一组螺旋桨使用不同的转速,在这种情况下反作用扭矩还存在,实现无人机机身的旋转。
接下来我们了解无人机俯仰运动,简单来说就是前进与后退,我们只需要控制前螺旋桨转动慢点,后螺旋桨转快点,就会在前后产生不同的升力,后升力较大 控制无人机俯冲,同理可得,我们将左边螺旋桨转的更快,右边转得慢一些,升力就会迫使无人机向右翻滚,这就是四旋翼无人机设计的美妙之处,在俯仰运动中 控制螺旋桨转速,让它们达到平衡扭矩为零,这样无人机就不会进一步俯或仰,才不会翻车和炸机,不妨想象一下,无人机是否可以在这个倾斜角度平衡?答案肯定是不能的,螺旋桨不仅仅有垂直力,同样也有水平力,即使垂直力保持平衡,也只是控制无人机不会上升或下降,水平力如果不平衡,就会引导无人机水平移动,同理可得,将无人机向一侧滚动并平衡垂直力,那么机身将偏移。

看一下无人机做圆周运动的物理原理,当一个物体在直线运动时,突然受到一个垂直于它的力,物体就会改变运动轨迹,当两个力达到平衡,物体就会做圆周运动,无人机也是同样的道理,通过遥控就能轻松使得无人机做精密圆周运动。
以上就是无人机的工作原理。希望对大家有所帮助!

